This was a great project posted by Mohamed Hazem on how to create a robotic hand out of hot glue. I his video he refers to hot glue as wax but its basically the same thing. The hands he shows how to build are fairly robust despite their method of construction. I have built hands in a similar way using some bike chain rather than ink tubes but the concept is remarkably similar. What I like about the pen tubes is that you could give this project bonus points for recycling. You could use any flexible material in substitute of the ink tubes.
Tools and PartsFor parts you will need some bundle straps, a thread reel, fishing line, 5 ink tubes, 5 servo motors, and an Arduino. You will also want to have a hot glue gun and some scissors available.
Step 1On a piece of paper, mark the distance between each of your fingers and assign each of them a reference number so you can determine which finger is which later on. Copy each number onto the corresponding strap.
Step 2Fold the strap at the marked points and press firmly down to ensure that it is a tight fold. It helps to use something solid such as a block of wood to press with. Repeat this process for the rest of the straps. Cut the ink tubes and position them about 0.7 mm away from the straps using the hot glue. This distance allows the fingers to bend freely.
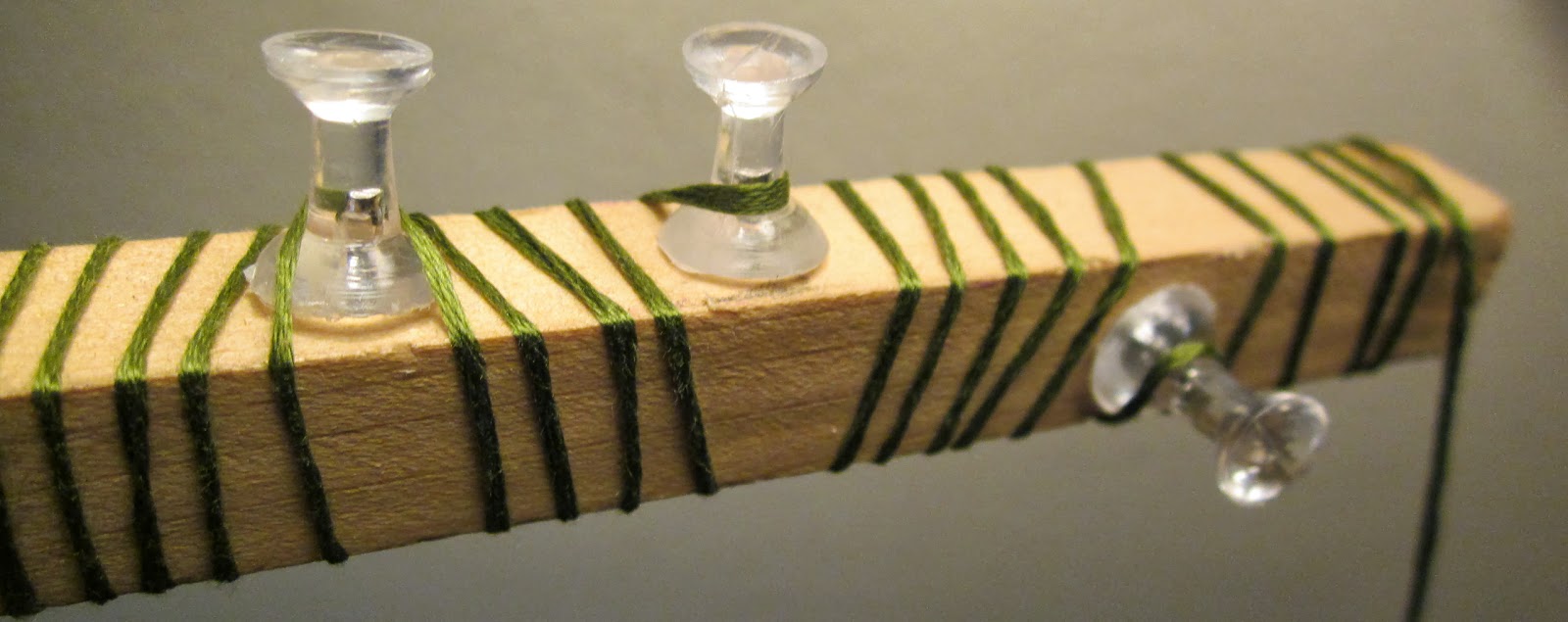
Step 3Wrap each of the sections with thread to add shape and volume to the fingers. This will also work to reinforce the structure of each of the digits.
Step 4Sew an elastic fabric band into the loops of thread and then wrap a bit more thread over the part you have just sewn to cover it up. Repeat this process for each digit of the finger. Try to taper the finger by making the width of each digit slightly less that the previous.
IMPORTANT: Before warping up the last digit of the finger (the finger tip) add a small drop of hot glue and tie a piece of fishing line to it. Then feed the fishing line down through the opening of the ink tube.
The fishing line is what gets attached to each servo to move the finger. Repeat the above steps for each finger until you have a whole handful!
The video gives some additional tips for controlling the movement of the finger. For instance, if you position another tube on the opposite side of the first one you can apply force to open the hand as well as just closing it. I like the idea of having that opening force as an option because it is closer to how the human hand applies force.
This type of hand uses a method called complaint grip which is where each of the fingers flex together, rather than having each finger individually controlled. This mean that when this type of hand holds something it will naturally conform to the shape of whatever it is holding. If the digits of each finger were individually controlled you would need more servos to control them and more processing power to determine what the position of each finger is. This makes complaint grip a good solution for creating robotic hands.
Enjoy!
In addition to this great video, I also have a post showing a pair of
robotic hands that I designed. My design is different from the one described in this tutorial and it might be worth checking them out if you are interested in building your own.






.jpg)